Gue bakal nge-post tentang Robot Kreatif dengan tema "ENTERTAINING ROBOT"
Tapi isinya bakal tentang ROBOT ORANG"an (baca: Robot Humanoid)
Robot Humanoid..

... adalah robot yang penampilan keseluruhannya dibentuk berdasarkan tubuh manusia, mampu melakukan interaksi dengan peralatan maupun lingkungan yang dibuat-untuk-manusia. Secara umum robot humanoid memiliki tubuh dengan kepala, dua buah lengan dan dua kaki, meskipun ada pula beberapa bentuk robot humanoid yang hanya berupa sebagian dari tubuh manusia, misalnya dari pinggang ke atas. Beberapa robot humanoid juga memiliki 'wajah', lengkap dengan 'mata' dan 'mulut'.
Robot inimampu berpikir dan bernalar untuk memecahkan masalah serta memiliki kreatifitas. Selain itu juga AI mampu bekerja dengan situasi yang membingungkan itu sebabnya kenapa AI sangat berkembang dalam dunia teknologi. Pada robot humanoid seperti pada video di atas haruslah memiliki sistem yang menunjang kecerdasan buatan ialah Sistem Gerak, Sistem visual dan Pencitraan, serta Sistem Keseimbangan dan Kestabilan.
1. Sistem Gerak
Telah dijelaskan sebelumnya bahwa robot humanoid dibuat semirip mungkin dengan manusia. Oleh karena itu, robot ini memiliki dua kaki sebagai alat penggeraknya. Selain itu, robot humanoid juga harus memiliki sendi-sendi agar gerakannya sama dengan manusia. Sistem gerakan pada robot umumnya adalah menggunakan motor. Motor merupakan bagian utama dari sebuah robot. Hampir semua jenis robot menggunakan motor. Beberapa jenis motor :
- Motor DC
Motor ini digunakan untuk penggerak pada robot beroda.
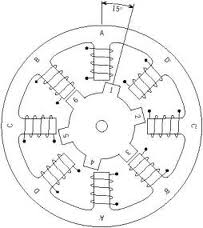
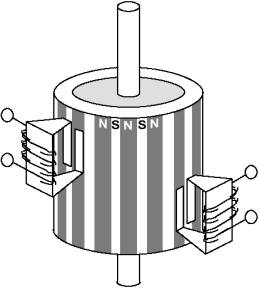
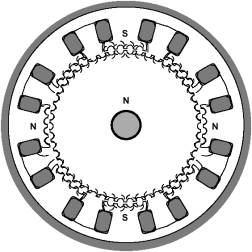
-Motor Servo
Motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam. Motor ini digunakan untuk bagian kaki, lengan atau bagian bagian lain yang mempunyai gerakan terbatas dan membutuhkan torsi cukup besar. Oleh karena itu, motor jenis inilah yang paling sering digunakan pada robot humanoid sebagai sistem penggeraknya.
2. Sistem Visual dan Pencitraan
Alat visual dan pencitraan pada robot adalah menggunakan kamera. Teknologi kamera digunakan untuk memproses objek atau benda sehingga robot mampu mengenali objek tersebut. Salah satu contoh kamera yang digunakan pada robot adalah LY CMOS PAL Wireless Video Camera.
1.Accelerometer
Accelerometer adalah sebuah instrumen yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, atau pun untuk mengukur percepatan akibat gravitasi bumi. Sebuah accelerometerpada dasarnya mengukur percepatan dan gravitasi yang dirasakan. Sebuah accelerometer yang diletakkan di permukaan bumi seharusnya mendeteksi percepatan sebesar 1g (ukuran gravitasi bumi) pada titik vertikalnya. Untuk percepatan yang dikarenakan oleh pergerakan horizontal, accelerator akan mengukur percepatannya secara langsung ketika dia bergerak secara horizontal.

Contoh Bagian-bagian Kaki Robot
2. Gyroscope
Sebuah gangsingan yang berputar pada porosnya memiliki besaran fisis yang membuatnya tetap berdiri ketika berputar yang disebut momentum angular. Berat gansingan mengakibatkan poros gansingan tidak berdiri tegak lurus melainkan sedikit miring. Momentum angular ditambah dengan berat gansingan tadi mengakibatkan gansingan melakukan dua gerakan berputar: putaran terhadap porosnya sendiri dan putaran terhadap poros vertical permukaan dimana sebuah gansingan berputar. Gerak berputar yang kedua ini disebut gerak presisi. Penggunaan Giroskop (Gyroscope) pada robot humanoid diharapkan mampu membantu mendeteksi ketidakseimbangan pada robot dan memanfaatkannya agar robot dapat stabil atau seimbang.
Humanoid robot didefinisikan sebagai robot yang penampilannya mirip dengan tubuh manusia. Sama seperti robot mekanik lainnya, humanoid disusun dari empat komponen dasar:
- Struktur Badan (body frame),
- Perasa (Sensor),
- Pengubah (Actuator) serta
- Perencanaan Pengaturan (program and control).
Secara umum humanoid robots lebih rumit daripada jenis robot lainnya. ASIMO merupakan salah satu contoh Humanoid robot buatan Honda, Jepang yang cukup populer sebagai robot yang mempunyai kemampuan berjalan seperti manusia. Robot dibuat dengan ukuran hampir sama dengan manusia dewasa dan bisa berjalan dengan teknologi pengontrolan keseimbangan yang sangat baik.
Apakah Robot Humanoid susah dibuat?
Humanoid robot memerlukan pengaturan secara simultan beberapa aktuator dalam satu pergerakan agar didapatkan satu keseimbangan. Ini tergantung pada tingkat kelincahannya dalam bergerak. Untuk pemula yang ingin tahu banyak tentang mekanisme pergerakannya bisa mencoba dengan kit yang sudah jadi.
Humanoid robot memerlukan pengaturan secara simultan beberapa aktuator dalam satu pergerakan agar didapatkan satu keseimbangan. Ini tergantung pada tingkat kelincahannya dalam bergerak. Untuk pemula yang ingin tahu banyak tentang mekanisme pergerakannya bisa mencoba dengan kit yang sudah jadi.
Apa saja kit yang diperlukan?
Salah satu kit yang mudah untuk digunakan adalah menggunakan aktuator modular. Aktuator modular terdiri atas roda gigi reduksi dan motor dengan fungsi networking. Badan robot dibentuk dengan menghubungkan antara satu aktuator dengan yang lainnya menggunakan frame penghubung.
Untuk mengatur pergerakan aktuator, digunakan sebuah kontroler yang terhubung secara kombinasi seri dan parallel ke semua aktuator. Untuk mengatur pergerakan aktuator, kontroller berkomunikasi dengan aktuator dengan mengirim dan menerima paket data.
“Instruction Packet” (mengirim data dari kontroler utama ke aktuator) untuk memerintahkan pergerakan dan “Status Packet” (dikirim dari aktuator ke kontroler untuk mengetahui kondisi pada posisi aktuator.
Jika kontroler dengan ID tertentu misalnya N, mengirim Paket perintah ke aktuator aktuator, hanya aktuator dengan ID N yang akan merespon dan melakukan perintah yang diberikan (misalnya berputar 90 derjat, dsb).
Perintah apa saja yang bisa diberikan ke Aktuator?
Tabel berikut adalah perintah dan nilai yang harus diberikan.
Bagaimana cara mengirimkan Perintah ke aktuator?
Berikut adalah contoh fungsi untuk mengirim dan menerima paket menggunakan atmega
Contoh program:
#define INST_WRITE= 0×03
bID = 0;
TxPacketLength = TxPacket(bID,INST_WRITE,2);
Program diatas merupakan mengirim perintah ke aktuator berisi kode 0×03 ke motor ID 0. Respon dari perintah di simpan di TxPacketLength.
Membaca kondisi akturor dilakukan dengan menggunakan RxPacket seperti contoh berikut.bRxPacketLength = RxPacket(DEFAULT_RETURN_PACKET_SIZE);
Membaca kondisi akturor dilakukan dengan menggunakan RxPacket seperti contoh berikut.bRxPacketLength = RxPacket(DEFAULT_RETURN_PACKET_SIZE);
Biaya
Perkiraan biayanya sih, kaya nya mahal.
Soalnya harga motor bisa 1 Jutaan, Servo bisa 1 Jutaan juga dikali ada berapa servo yang kita pakai. DItambah lagi dengan komponen perangkat lainnya bro.
Nih kalo mau liat videonya gan!!
http://www.youtube.com/watch?feature=player_embedded&v=HfUHrl8-59c
Source :
http://id.wikipedia.org/wiki/Robot_humanoid
http://affan_muh-fst08.web.unair.ac.id/artikel_detail-35042-Umum-Sistem%20Pendukung%20pada%20Robot%20Humanoid.html
http://devilmavioso.wordpress.com/update-post/tulisan/robot-humanoid/
http://elkalanjut.blogspot.com/2010/11/v-behaviorurldefaultvmlo_03.html