Motor
DC (Direct Current) Motors adalah dua kawat (kekuasaan & tanah), motor rotasi terus menerus. Bila Anda memasok listrik, motor DC akan mulai berputar sampai kekuasaan yang dihapus. Kebanyakan motor DC dijalankan pada RPM tinggi (putaran per menit), contoh menjadi kipas pendingin komputer, atau roda mobil dikendalikan radio!
Kecepatan motor DC dikontrol menggunakan modulasi lebar pulsa (PWM), teknik cepat berdenyut kekuatan dan mematikan. Persentase waktu yang dihabiskan bersepeda on / off rasio menentukan kecepatan motor, misalnya jika daya bersepeda di 50% (setengah, setengah off), maka motor akan berputar pada kecepatan setengah dari 100% (sepenuhnya pada). Setiap pulsa begitu cepat sehingga motor tampaknya terus berputar tanpa gagap!
Motor dapat diartikan sebagai penggerak. Motor berfungsi sebagai pengubah sumber energi (panas, uap, bensin, cahaya, air, listrik, dll) menjadi tenaga penggerak.Sebagai contoh: pada motor listrik: energi listrik (input) dikonversikan menjadi energi putar/gerakan berputar (output).
Menurut perputarannya motor dibagi menjadi 2 yaitu CW dan CCW
a. Motor CW
CW atau Counter Wise berputar searah jarum jam
b. Motor CCW
CCW atau Counter Clock Wise putarannya berlawanan arah dengan jarum jam.


Stepper
Motor Stepper adalah suatu motor listrik yang dapat mengubah pulsa listrik yang diberikan menjadi gerakan motor discret (terputus) yang disebut step (langkah). Satu putaran motor memerlukan 360° dengan jumlah langkah yang tertentu perderajatnya. Ukuran kerja dari motor stepper biasanya diberikan dalam jumlah langkah per-putaran per-detik.
Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Pada dasar-nya terdapat 3 tipe motor stepper yaitu:
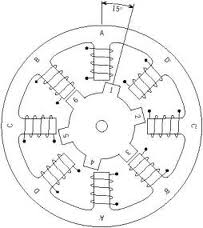
a. Motor Stepper Tipe Variable Reluctance (VR)
Motor
stepper jenis ini telah lama ada dan merupakan jenis motor yang secara
struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah
rotor besi lunak dengan beberapa gerigi dan sebuah lilitan stator.
Ketika lilitan stator diberi energi dengan arus DC, kutub-kutubnya
menjadi termagnetasi. Perputaran terjadi ketika gigi-gigi rotor tertarik
oleh kutub-kutub stator
Gambar Penggunaan Stepper
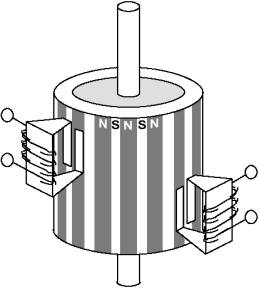
b. Motor Stepper Tipe Permanent Magnet (PM)
Motor
stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar
(tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling
dengan kutub yang berlawanan. Dengan adanya magnet permanen, maka
intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat
menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki
resolusi langkah (step) yang rendah yaitu antara 7,5° hingga 15° per
langkah atau 48 hingga 24 langkah setiap putarannya.
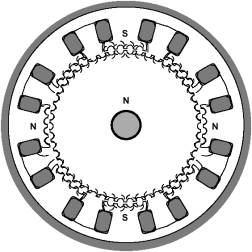
c. Motor Stepper Tipe Hybrid (HB)
Motor
stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari
kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki
gerigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang
tersusun secara aksial pada batang porosnya seperti motor tipe PM.
Motor tipe ini paling banyak digunkan dalam berbagai aplikasi karena
kinerja lebih baik. Motor tipe hibrid dapat menghasilkan resolusi
langkah yang tinggi yaitu antara 3,6° hingga 0,9° per langkah atau
100-400 langkah setiap putarannya
Servo

Motor
servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan
sistem closed feedback yang terintegrasi dalam motor tersebut. Pada
motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan
kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor
servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR)
atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk
menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan
sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada
pin kontrol motor servo.

a. Servo Standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.

b. Motor Servo Continuous Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu)

source:
https://www.modmypi.com/blog/whats-the-difference-between-dc-servo-stepper-motors
http://www.amci.com/tutorials/tutorials-stepper-vs-servo.asp
http://www.sciencebuddies.org/science-fair-projects/project_ideas/Robotics_ServoMotors.shtml?from=Blog
http://en.wikipedia.org/wiki/Servomotor
http://en.wikipedia.org/wiki/Stepper_motor
http://www.ilmu.8k.com/pengetahuan/stepper.htm










